Excited to see the FPS impact this will have. Going to run a few experiments.
It'll change how some of the course packages should be provided with LIDAR.
Seems like as small as possible terrain 1 with 8192*8192 satellite image and a second terrain of 3500x3500 (or so) with the same center.
Then on the periphery, as you reach the outer meshes the second terrain should come into view.
Best second terrain settings yet to be determined but could be 512 or 1024 heightmap resolution is my guess. Pixel error 5ish...
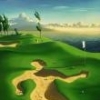
My Pebble Beach's (4 holes) second terrain uses 2048 resolution height map (little too much maybe) with 4096 meters terrain (2 meters grid) and pixel error is 5. My first terrain is 650 meters also with 2048 resolution height map (about 0.32 meters grid!!!). So the settings are high.
After disabling the drawing of the first terrain, everything can be maxed up in my test project's graphics settings but the "Grass object distance". I keep it in 125 meters and everything runs smoothly as silk no matter how much I spin the camera. My grasses are so thin and high res anyway that you couldn't see them any further anyways. And my second terrain is quite full of speed trees too. The high accuracy of my first terrain is maybe the reason for grasses to be quite FPS heavy. You can imagine how small is my painting tool's smallest size (0.32*0.32 meters) or how small is also the largest size  .
.
The spline mesh grid over the invisible terrain can be what resolution you want (every spline can be different) so the mesh terrain isn't FPS heavy. I recommend first terrain to have about 0.5 - 1 meter grid if possible. Then you can have quite nicely those steep bunker edges. 0.32 meter grid is too much and couses different problems.
I'll release this Pebble Beach test project this week, so you'll see the result.
Didn't come out as good as I wanted, but I'm quite pleased anyway.





 . So unchecking the "draw" terrain must have a major positive influence to FPS rate.
. So unchecking the "draw" terrain must have a major positive influence to FPS rate.









